Il post processing
Cos'è e come funziona?
Il
post processing dei dati, come avviene per la scansione con un sistema LiDAR,
può essere utilizzato per una varietà di situazioni differenti: tra queste, ad
esempio, il “forest management”, ossia un supporto specifico nella manutenzione
e controllo di ampi ettari di terrano.
I dati
ottenuti da questo sistema permettono di ricavare informazioni tra le più
disparate:
- l'altezza della chioma degli alberi
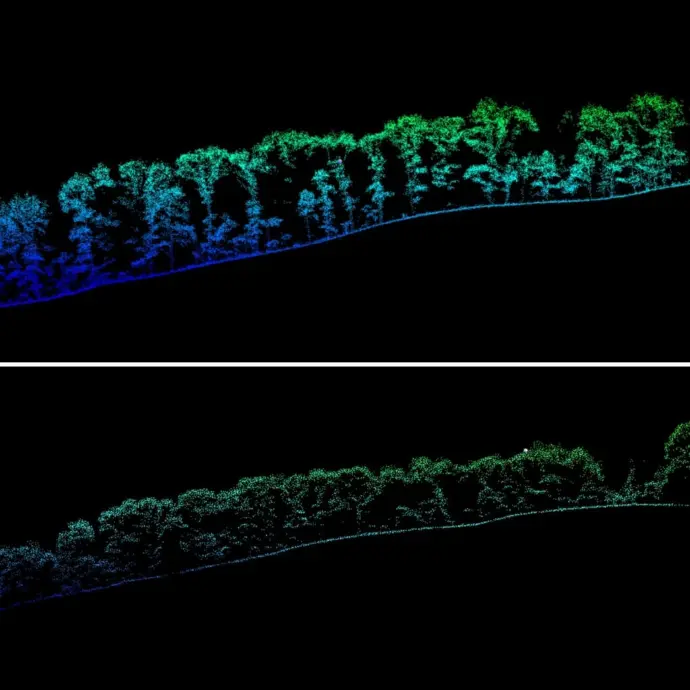
- una struttura verticale della foresta
- DBH e l'identificazione delle specie presenti in natura
Ma cos'è, effettivamente, il post processing?
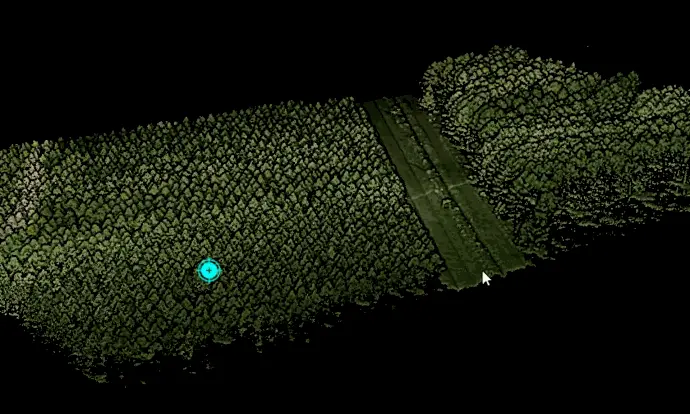
Si tratta dell'elaborazione di dati ottenuti dall’utilizzo del sistema LiDAR dopo aver sorvolato, con il drone, l’area interessata alla raccolta dati. Durante il volo di un drone sopra una delle nostre foreste, il sistema LiDAR procede ad emettere una pioggia di impulsi laser. I dati ottenuti dal sistema LiDAR corrispondono al tempo che questi impulsi impiegano per ritornare al sensore LiDAR dopo essere stati riflessi sugli oggetti presenti nell'ambiente sottostante. Una volta ottenuti i dati, questi vengono processati e analizzati per creare un modello 3D dettagliato del terreno o degli oggetti circostanti, per poi essere utilizzati.
L’elaborazione (processing) dei dati LiDAR comporta una serie di passaggi tra cui: la post elaborazione della traiettoria, la generazione della nuvola di punti, l'accuratezza della nuvola, il filtering e il cleaning della nuvola di punti, la colorazione della nuvola, e infine la classificazione dei punti.
Ma cos'è la nuvola di punti?
Si tratta di un formato comune per i dati LiDAR: è una collezione di singoli punti di dati in un piano tridimensionale con ciascun punto avente una coordinata impostata sugli assi X, Y, e Z. Ogni punto corrisponde a luogo in cui l’impulso laser è entrato in contatto con un oggetto ed è poi tornato al sensore LiDAR. Ci sono 4 diversi tipi di file per analizzare una singola nuvola di dati:
- .LAS -
questa
è la tipologia di file più comune per la nuvola di punti 3D non compressa.
Contiene le informazioni geografiche XYZ dei punti assieme ad una varietà di
altri dati.
- .LAZ - una versione compressa del file LAS.
- .TXT - di solito, delimitato da virgole, contiene la posizione XYZ di punti specifici.
- .CSV - un file testo strutturto in forma di tabella, contenente la posizione XYZ di punti specifici, di solito delimitato da virgole.
Quali sono le sfide dell’elaborazione dei dati?
- Garantire l'accuratezza dei dati
- L'influenza del "rumore"
- La possibilità di occlusione
- La quantità di informazioni
- I tempi e i costi dell'operazione
Tutti gli steps della post processing:
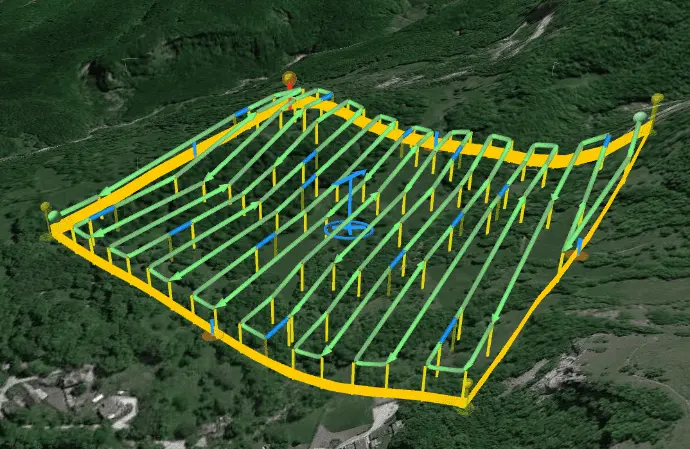
Step 1: Post elaborazione di una traiettoria
- La traiettoria è il percorso di volo compiuto dal drone durante la mappatura.
- Durante il volo possono verificarsi errori e anomalie, che possono risultare in un percorso di volo registrato non perfetto - attraverso il sistema di post processing possiamo andare a localizzare questi errori e aggiungere delle correzioni.
- Queste correzioni vengono effettuate su tutto il percorso da algoritmi all'interno del software.
-
Una
volta compiute queste correzioni, si avrà un percorso di volo più accurato e
affidabile.
Step 2: Generare la nuvola di punti
-
Finita
l'elaborazione della traiettoria si procede a generare la nuvola di punti, strumento
molto più preciso e accurato.
Step 3: Affinare l'accuratezza della nuvola di punti
-
In questo step, si va a regolare con precisione l'accuratezza relativa
delle nuvole di punti, ottimizzando la corrispondenza tra le linee di
volo sovrapposte.
Step 4: Filtering e cleaning la nuvola di punti
- È un importante passo nel processo dell'elaborzione.
- I dati LiDAR sono "rumorosi", e quindi è importante rimuovere dalla nuvola tutti quei punti errati e non necessari per migliorare l'accuratezza del prodotto finale.
-
Il
filtering e il cleaning vengono realizzati utilizzando una varietà di metodi,
tra cui "density-based filtering" o "statistical outlier removal".
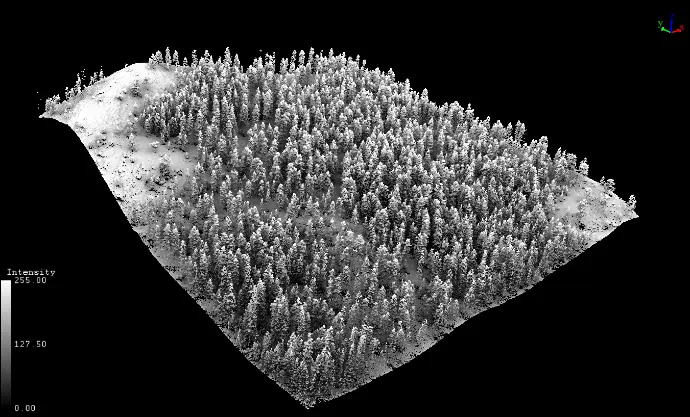
Step 5: Colorare la nuvola di punti
-
La
colorizzazione della nuvola di punti avviene codificando quest’ultima con i
valori RGB dei pixel dell'immagine raccolti dalla telecamera del sistema LiDAR.
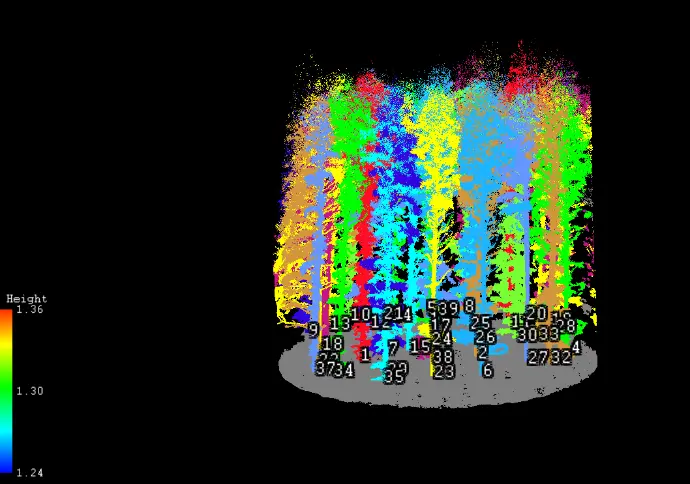
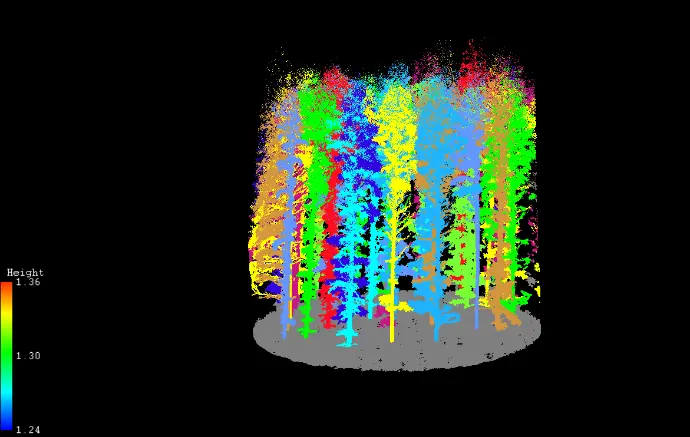
Step 6: Classificare i punti
- La classificazione è l'ultimo passaggio da compiere nell'elaborazione e serve per estrarre e segmentare caratteristiche come il suolo, la vegetazione, edifici, ecc.
- La classificazione può essere fatta in due modi:
- Manualmente per spostare punti da una classe di dati ad un'altra.
-
Automaticamente utilizzando macro, filtri o altri strumenti AI.